

相(xiàng)關產品推薦更多 >>

衛生型渦輪流量計在油水氣三相計量中應(yīng)用研究(jiū)
點擊次數:1961 發布時間:2021-01-13 17:45:12
油井三相流的分離分相計量精度主要是受氣液分離程(chéng)度和含水率計(jì)精度的影響。提(tí)出利用同軸(zhóu)線相(xiàng)位法環空找水儀和衛生型(xíng)渦輪流量計的響應函數來控(kòng)製(zhì)氣液(yè)分離(lí), 其控製是基於神經網(wǎng)絡的(de)自校(xiào)正控製。含水率(lǜ)測量選用高精度的同軸線相位法含水(shuǐ)率計, 這滿足了油井三相流的精確計量要(yào)求。
在油田(tián)生產過程參數 (如溫度(dù)、壓力等) 檢測中, 以流量和各相持率測量非(fēi)常為(wéi)複雜, 是較難測量的兩個參數, 引起了工程技(jì)術人員的興趣。隨著油田的發展, 被測對象不再局限於單相流, 而要對多(duō)相流、混合狀態的流量進行測量。測量(liàng)多相流的技術難度要比單相流體的精確(què)測量大的多, 知道單相流體的密度、粘度及測量裝置的幾何結(jié)構, 便可以(yǐ)對單(dān)相(xiàng)流進行定量分(fèn)析。如果能利用多相流中每一相的上述各物理量對多相流進行(háng)測量的話, 就很方便(biàn)。但很遺憾的是(shì), 多相流體的特性遠比單相流體的特性複雜(zá)的多, 如各組分之間不能均(jun1)勻混合、混合流體的異常性、流型轉變, 相對速度、流體性質、管道結構、流動方向等因素將導致渦(wō)輪流(liú)量傳感器響應特性的改變。
在單相流的條件(jiàn)下, 渦輪的(de)轉速和流經它的體積流量成一單值線性函數, 在油水兩相流中, 隻要流量超過始動(dòng)流量(liàng), 在允許的(de)誤差範圍內, 渦(wō)輪的響應和體積流量也是成線性函數。
但在多相流(liú)動(dòng)中, 即(jí)使在總流量保持不變(biàn)的情況下, 混合流體的密度發生變化, 也會引起渦(wō)輪轉速的很大變化。混合流體經過氣液分離後, 利用成熟的單相(xiàng)流測量技術(shù)和相分率測量技術計量(liàng), 因此(cǐ)計量的不(bú)確定度主要受氣液分離(lí)程度的影響。基於此, 提出利(lì)用同軸線含水率計和衛生型渦輪流量計的響應函數(shù)混合控製氣液(yè)分離器方法。
1 工作原理
衛生(shēng)型渦輪流量計是一速度(dù)式流量計, 它通(tōng)過測定流體中渦輪的轉速來反映流量的大小。在(zài)管道中心放置一個渦輪, 當流(liú)體通(tōng)過管道時衝擊渦輪葉片, 對渦輪產(chǎn)生驅動力矩, 使渦(wō)輪克服阻力矩而產生旋轉。在一(yī)定流量、黏度範圍內的(de)流體介質中, 渦輪的旋轉角速度與流(liú)體的(de)流速成正比。因此, 流體的流速可以通過(guò)渦輪的旋轉角速度求得, 進而通(tōng)過換算可得出通(tōng)過管道的(de)流體流量。氣(qì)液兩相流時, 由於相(xiàng)比液相的速度高, 所(suǒ)以測量結果增大(dà)。同軸(zhóu)線相位法環空找水儀是通過(guò)測量電磁波在油水混合介質中傳播的相位差來(lái)測量含水率。當有氣的時候, 氣液(yè)混合介質的介電常數(shù)的(de)增大, 使(shǐ)得同軸線相(xiàng)位法環空找水儀的響應值比液體的時候, 下降很多。當氣液分離完全的時候, 它的響應值就又上升到純液的時候的值, 據此判定, 氣液分離完全。
氣在氣液分離時利(lì)用衛生型渦輪流量計和同軸線相位法環空找水儀的(de)響應函數來控製氣液分離器將很好的減小測量的誤差。
神經網絡的自校正(zhèng)控製, 沒有參考模型, 而(ér)依靠在線遞推識(shí)別 (參數估計) 估計係統未知的參數(shù), 以此來在線控製設計算法進(jìn)行(háng)實時反饋控製。設單輸(shū)入(rù)單輸出線性係統為

式中:yk-1為對象輸出;uk為控製器輸出。
f (·) 和g (·) 未知, BP神經網絡通過學習算法可以逼近這些函數並(bìng)重新自校正控製規律, 為(wéi)簡單起見, 設被控製對象為一階係統, 即

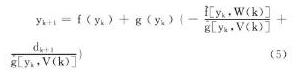
通過神(shén)經網絡利用模(mó)型得

去逼近對(duì)象模型, 其中(zhōng)W=W[W0, W1, ……, W2P], V=[V0, V1, ……, V2q], 且有

相應的控製規律為

將式 (4) 代入式 (3) 可得
使得定義的輸出誤
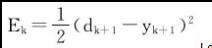
為非常小, 於是有:小, 於是有:
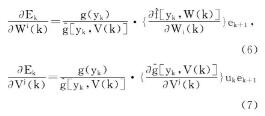
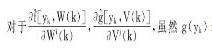
未知, 但其符號已知, 可用sgn[g (yk) ]代替g (yk) , 這樣就可以得到調整W (k) 和V (k) 的學習規則為(wéi)
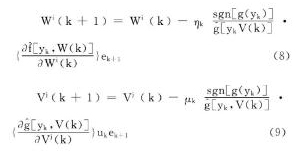
式(shì)中:ηk, μk分別為學習效率。
2 應用實例
水氣模擬環路中, 以(yǐ)清(qīng)水模擬油井產出液(yè), 以空氣模(mó)擬油井的分離氣。通過調節標準流量渦輪獲得標準流量。標準流量的水和一定量的氣體混合, 即得到混合液。混合液通過分離裝置, 經分離, 即可得到分離後(hòu)的水的流量。在試驗中, 當含水率(lǜ)計(jì)的響應值為(wéi)全水值時, 即表示分離完全, 且實驗選用的含(hán)水率計的全水值為4500Hz。神經網絡的結構選4-5-3, 學習速率ηk=0.78, μk=0.64, 加權係數初始值取區間[-0.5, 0., 5]上的隨機(jī)數。輸入指令信號為采樣得到的一路(lù)同(tóng)軸線(xiàn)相位法找水率計信號(hào), 輸(shū)出信號取衛生型(xíng)渦輪流(liú)量計的信號(hào)。
3 結(jié)束語
通過同軸線相(xiàng)位(wèi)法含水率計(jì)和衛生型(xíng)渦輪流量(liàng)計的響(xiǎng)應函數來控製氣液分離, 可以實時監測調整, 基本達到完全分離(lí)的目的。
基於神經網絡的自校正控製, 可以有效的實(shí)現對氣液分(fèn)離的實時(shí)控製。
此方法效果好, 現已在現(xiàn)場應用, 前景廣闊。
在油田(tián)生產過程參數 (如溫度(dù)、壓力等) 檢測中, 以流量和各相持率測量非(fēi)常為(wéi)複雜, 是較難測量的兩個參數, 引起了工程技(jì)術人員的興趣。隨著油田的發展, 被測對象不再局限於單相流, 而要對多(duō)相流、混合狀態的流量進行測量。測量(liàng)多相流的技術難度要比單相流體的精確(què)測量大的多, 知道單相流體的密度、粘度及測量裝置的幾何結(jié)構, 便可以(yǐ)對單(dān)相(xiàng)流進行定量分(fèn)析。如果能利用多相流中每一相的上述各物理量對多相流進行(háng)測量的話, 就很方便(biàn)。但很遺憾的是(shì), 多相流體的特性遠比單相流體的特性複雜(zá)的多, 如各組分之間不能均(jun1)勻混合、混合流體的異常性、流型轉變, 相對速度、流體性質、管道結構、流動方向等因素將導致渦(wō)輪流(liú)量傳感器響應特性的改變。
在單相流的條件(jiàn)下, 渦輪的(de)轉速和流經它的體積流量成一單值線性函數, 在油水兩相流中, 隻要流量超過始動(dòng)流量(liàng), 在允許的(de)誤差範圍內, 渦(wō)輪的響應和體積流量也是成線性函數。
但在多相流(liú)動(dòng)中, 即(jí)使在總流量保持不變(biàn)的情況下, 混合流體的密度發生變化, 也會引起渦(wō)輪轉速的很大變化。混合流體經過氣液分離後, 利用成熟的單相(xiàng)流測量技術(shù)和相分率測量技術計量(liàng), 因此(cǐ)計量的不(bú)確定度主要受氣液分離(lí)程度的影響。基於此, 提出利(lì)用同軸線含水率計和衛生型渦輪流量計的響應函數(shù)混合控製氣液(yè)分離器方法。
1 工作原理
衛生(shēng)型渦輪流量計是一速度(dù)式流量計, 它通(tōng)過測定流體中渦輪的轉速來反映流量的大小。在(zài)管道中心放置一個渦輪, 當流(liú)體通(tōng)過管道時衝擊渦輪葉片, 對渦輪產(chǎn)生驅動力矩, 使渦(wō)輪克服阻力矩而產生旋轉。在一(yī)定流量、黏度範圍內的(de)流體介質中, 渦輪的旋轉角速度與流(liú)體的(de)流速成正比。因此, 流體的流速可以通過(guò)渦輪的旋轉角速度求得, 進而通(tōng)過換算可得出通(tōng)過管道的(de)流體流量。氣(qì)液兩相流時, 由於相(xiàng)比液相的速度高, 所(suǒ)以測量結果增大(dà)。同軸(zhóu)線相位法環空找水儀是通過(guò)測量電磁波在油水混合介質中傳播的相位差來(lái)測量含水率。當有氣的時候, 氣液(yè)混合介質的介電常數(shù)的(de)增大, 使(shǐ)得同軸線相(xiàng)位法環空找水儀的響應值比液體的時候, 下降很多。當氣液分離完全的時候, 它的響應值就又上升到純液的時候的值, 據此判定, 氣液分離完全。
氣在氣液分離時利(lì)用衛生型渦輪流量計和同軸線相位法環空找水儀的(de)響應函數來控製氣液分離器將很好的減小測量的誤差。
神經網絡的自校正(zhèng)控製, 沒有參考模型, 而(ér)依靠在線遞推識(shí)別 (參數估計) 估計係統未知的參數(shù), 以此來在線控製設計算法進(jìn)行(háng)實時反饋控製。設單輸(shū)入(rù)單輸出線性係統為
式中:yk-1為對象輸出;uk為控製器輸出。
f (·) 和g (·) 未知, BP神經網絡通過學習算法可以逼近這些函數並(bìng)重新自校正控製規律, 為(wéi)簡單起見, 設被控製對象為一階係統, 即
通過神(shén)經網絡利用模(mó)型得
去逼近對(duì)象模型, 其中(zhōng)W=W[W0, W1, ……, W2P], V=[V0, V1, ……, V2q], 且有
相應的控製規律為
將式 (4) 代入式 (3) 可得
使得定義的輸出誤
為非常小, 於是有:小, 於是有:
未知, 但其符號已知, 可用sgn[g (yk) ]代替g (yk) , 這樣就可以得到調整W (k) 和V (k) 的學習規則為(wéi)
式(shì)中:ηk, μk分別為學習效率。
2 應用實例
水氣模擬環路中, 以(yǐ)清(qīng)水模擬油井產出液(yè), 以空氣模(mó)擬油井的分離氣。通過調節標準流量渦輪獲得標準流量。標準流量的水和一定量的氣體混合, 即得到混合液。混合液通過分離裝置, 經分離, 即可得到分離後(hòu)的水的流量。在試驗中, 當含水率(lǜ)計(jì)的響應值為(wéi)全水值時, 即表示分離完全, 且實驗選用的含(hán)水率計的全水值為4500Hz。神經網絡的結構選4-5-3, 學習速率ηk=0.78, μk=0.64, 加權係數初始值取區間[-0.5, 0., 5]上的隨機(jī)數。輸入指令信號為采樣得到的一路(lù)同(tóng)軸線(xiàn)相位法找水率計信號(hào), 輸(shū)出信號取衛生型(xíng)渦輪流(liú)量計的信號(hào)。
3 結(jié)束語
通過同軸線相(xiàng)位(wèi)法含水率計(jì)和衛生型(xíng)渦輪流量(liàng)計的響(xiǎng)應函數來控製氣液分離, 可以實時監測調整, 基本達到完全分離(lí)的目的。
基於神經網絡的自校正控製, 可以有效的實(shí)現對氣液分(fèn)離的實時(shí)控製。
此方法效果好, 現已在現(xiàn)場應用, 前景廣闊。